新闻网讯 近日,我校自动化专业2019级本科生李聪同学撰写的英文学术论文《Finite-Time Adaptive Event-Triggered Control for Robot Manipulators With Output Constraints》在线发表于电路与系统领域知名期刊《IEEE Transactions on Circuits and Systems-II: ExpressBriefs》。该期刊是IEEE电路与系统协会老牌旗舰期刊之一,为SCI源刊,主要刊登电路系统、控制系统等研究领域高质量、原创性的研究论文和评论性文章。李聪同学为论文的第一作者,指导老师和论文通讯作者均为自动化学院赵林副教授。
论文针对带有输出受限机器人系统提出了一种新的有限时间自适应事件触发控制方法,将命令滤波反步控制与事件触发控制相结合,既保留了命令滤波反步控制的计算简便、瞬态性能好等优点,同时又通过事件触发降低了通信与资源损耗,使关节位置跟踪误差在有限时间内收敛到期望的领域。为了验证算法的优越性,论文以一个二连杆机械臂模型进行验证,通过与不考虑输出受限的控制方法和仅满足指数收敛的反步方法做仿真对比发现,论文所提出的方法有着更好的收敛和稳态性能。
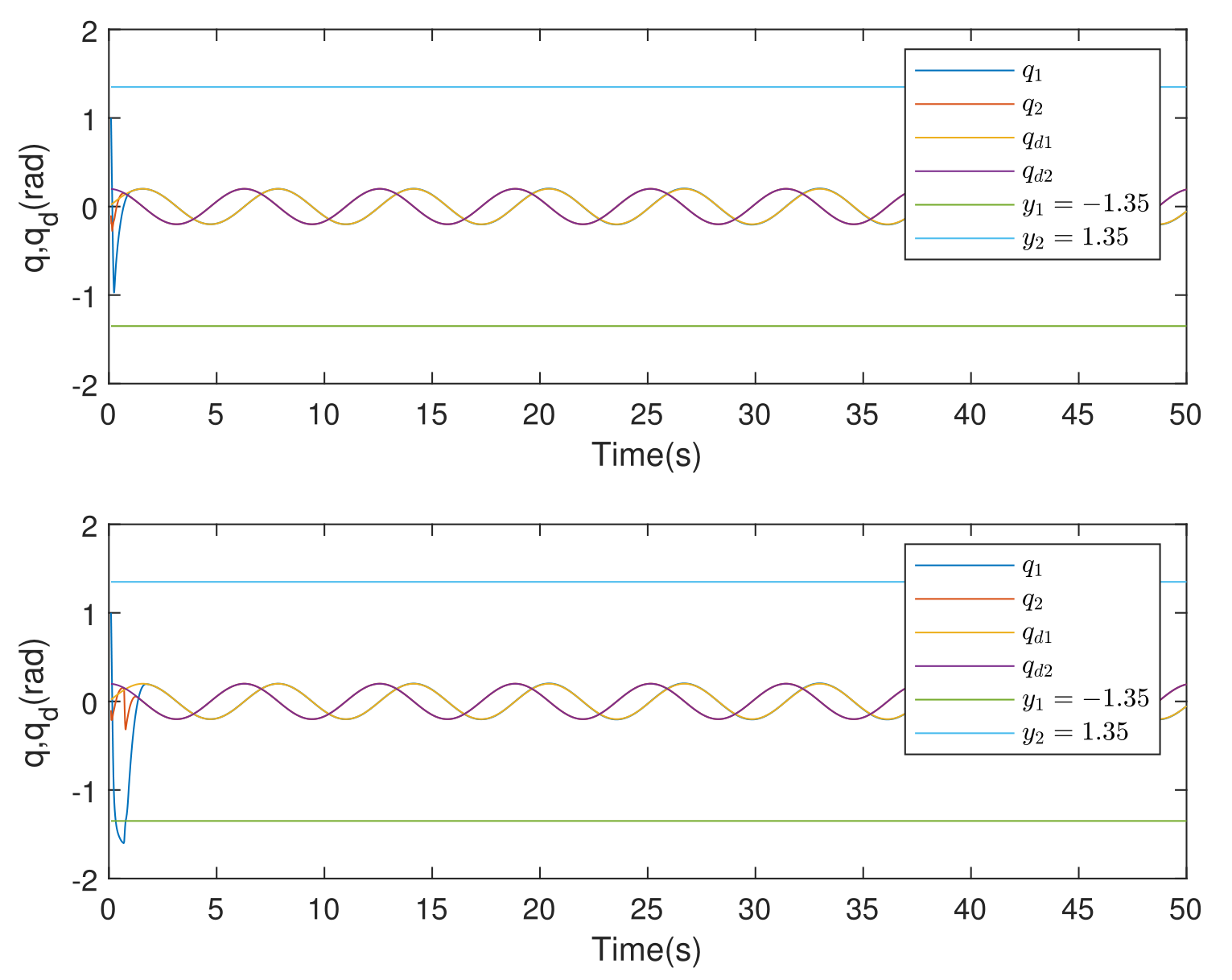

图1 论文中FTAETCFB方法的输出与对比误差曲线
近年来,自动化学院致力于推进本科生和研究生科研水平,赵林副教授所在的于金鹏教授团队,本着激发学生创造力的原则,对学生悉心指导,取得了优异的成果,指导本科生和研究生在IEEE TNNLS、IEEE TFS、IEEE TCASII等高水平期刊发表系列论文20余篇,学院本科生和研究生科研水平呈现良好的发展势头。


